











システムモデリング言語(SysML)の分野において、要素が定義される順序はプロジェクトの成功を左右することが多い。実務者によく見られる誤りは、構造を確立する前に行動を定義しようとする傾向である。このアプローチは脆弱なモデル基盤を生み出し、再作業や曖昧さ、検証の困難を引き起こす。本ガイドは、構造よりも行動を優先するという落とし穴を検証し、堅牢なシステム定義への構造的な道筋を提示する。
基盤を理解する:構造と行動の違い 🏗️
システム工学は、複雑な現実を扱いやすいモデルに抽象化することに依存している。SysMLは、システム記述の2つの主要な次元をサポートしている:
-
構造:物理的および論理的な構成要素、それらの関係性、インターフェースを定義する。ブロック、パーツ、ポート、接続器を含む。
-
行動:システムが実行する動的アクション、状態、フローを定義する。状態機械、アクティビティ図、シーケンス図を含む。
モデルャーが行動に直ちに飛び込むと、実行するコンテナを定義せずに機能を記述しているのと同じである。これは、俳優が誰か、舞台がどう見えるかを決める前に、演劇の台本を書くようなものである。行動は重要だが、具体的な構造的枠組みに根ざしていなければならない。
多くのプロジェクトが、構造的な整合性が弱いために苦戦している。ブロックとそのインターフェースが明確に定義されていないと、行動図は断片的な物語になってしまう。以下のセクションでは、具体的な誤りとその修正方法を詳述する。
誤り1:定義されたブロックなしに状態機械を作成する ⏳
最も一般的な誤りの一つは、状態機械図(STD)から始めることである。状態機械は、イベントに基づいてシステムが状態間をどのように遷移するかを記述する。しかし、状態は何かに属している必要がある。その「何か」がブロックである。
-
誤り:モデルャーは、システムをサブブロックに分解せずに、汎用的な「システム」ブロックに状態機械を作成して割り当ててしまう。
-
結果:要件が進化するにつれ、単一のブロックは管理不能な大きさになる。論理の変更にはトップレベルのブロックを修正する必要があり、その結果、すべての派生する行動に影響が及ぶ。
-
解決策:まずブロック定義図(BDD)を定義する。システムを論理的なサブシステムに分解する。論理が関連する特定のサブブロックに状態機械を割り当てる。
推進システムを例に挙げよう。すぐに「エンジン状態機械」をモデル化すると、それが燃料ポンプ、点火、排気のいずれを制御するかを決定しなければならない。まずブロック構造を定義することで、「燃料サブシステム」ブロックが燃料論理を所有し、「点火サブシステム」ブロックが火花論理を所有することを明確にできる。
誤り2:内部ブロック図(IBD)を無視する 🔄
内部ブロック図は接続の設計図である。パーツがポートや接続器を通じてどのように相互作用するかを示す。行動的視点を優先してこの図を無視することは重大な見落としである。
-
誤り:構造的インターフェースを定義せずに、データフローを示すためにシーケンス図にのみ依存すること。
-
結果:データフローは定義されているが、データの種類や物理的インターフェースは定義されていない。これにより、ライフサイクルの後半で統合失敗が発生する。
-
解決策:IBDを用いて情報および物質のフローを定義する。すべてのポートに明確なタイプ(例:データ、信号、フロー)を設定する。
IBDによって構造が定義されると、行動図に文脈が生まれる。アクティビティ図のフローは、IBDで定義された特定のポートを参照できる。このリンクにより、行動が物理的に実行可能であることが保証される。
誤り3:シーケンス図を早々に過剰に設計する 📉
シーケンス図(SD)は、時間経過にわたるオブジェクト間の相互作用を詳細に記述するのに優れている。しかし、オブジェクト構造がまだ安定していないプロジェクト初期段階で、しばしば過剰に使用される。
-
誤り:ブロック定義にまだ存在しないオブジェクト間で詳細なメッセージシーケンスを作成すること。
-
結果:再作業率の高さ。構造が変更された場合、シーケンス図は頻繁に破綻するか、大幅な修正を要する。
-
解決策:シーケンス図を精査に使用する。BDDおよびIBDが安定した後、SDを用いて相互作用ロジックを検証する。
シーケンス図は、初期段階では正当化されないオブジェクトインスタンス化のレベルを示唆する。まず構造を通じた要件の流れに注目する。構造的な境界が明確になったら、SDを用いて複雑なロジックを明確にする。
ミス4:要件トレーサビリティを無視する 📝
構造と振る舞いは要件を満たすために存在する。よくあるミスは、完成したように見えるモデルを作成するが、それらを駆動した要件へのリンクが欠けていることである。
-
誤り:要件図にリンクせずにブロックや状態を構築すること。
-
結果:モデルが顧客のニーズを満たしているかどうかを検証できない。検証プロセスは手動になり、エラーが発生しやすくなる。
-
解決策:重要なブロックおよび状態すべてを要件にリンクする。このリンクを維持するために要件図を使用する。
トレーサビリティにより、モデルが単なる図面作成にとどまらないことが保証される。すべての構造的要素および行動的遷移が正当な根拠を持つことを検証する。これは認証および準拠にとって不可欠である。
ミス5:パラメータとプロパティを混同する 📊
プロパティはブロックの状態を記述する(例:温度、電圧)。パラメータはインターフェースを記述する(例:入力信号、出力データ)。これらを混同すると、モデル作成時に混乱が生じる。
-
誤り:データポイントをすべて内部プロパティとして扱うか、逆にすべてパラメータとして扱うことで、本来の用途と異なる扱いをする。
-
結果:データフローの曖昧さ。データの発生源や消費場所が不明瞭になる。
-
解決策:内部状態(プロパティ)と外部インタラクション(パラメータ)を厳密に区別する。
一般的な誤りの比較分析
以下の表は、SysMLの主要領域における誤ったアプローチと推奨されるアプローチの違いを要約している。
|
領域 |
一般的な誤り |
推奨されるアプローチ |
|---|---|---|
|
図の開始 |
行動図(STD、ACT)から始めます |
構造図(BDD、IBD)から始めます |
|
ブロックの分解 |
すべての論理を1つのトップレベルブロックに統合 |
明確な所有権を持つサブシステムに分解する |
|
データフロー |
行動にのみ示唆される |
型付きポートを用いてIBDで明示的に定義 |
|
トレーサビリティ |
モデル化が完了した後に追加 |
要素の作成中にリンクされる |
|
インターフェース定義 |
隠されているか曖昧 |
ポートとインターフェースを通じて定義 |
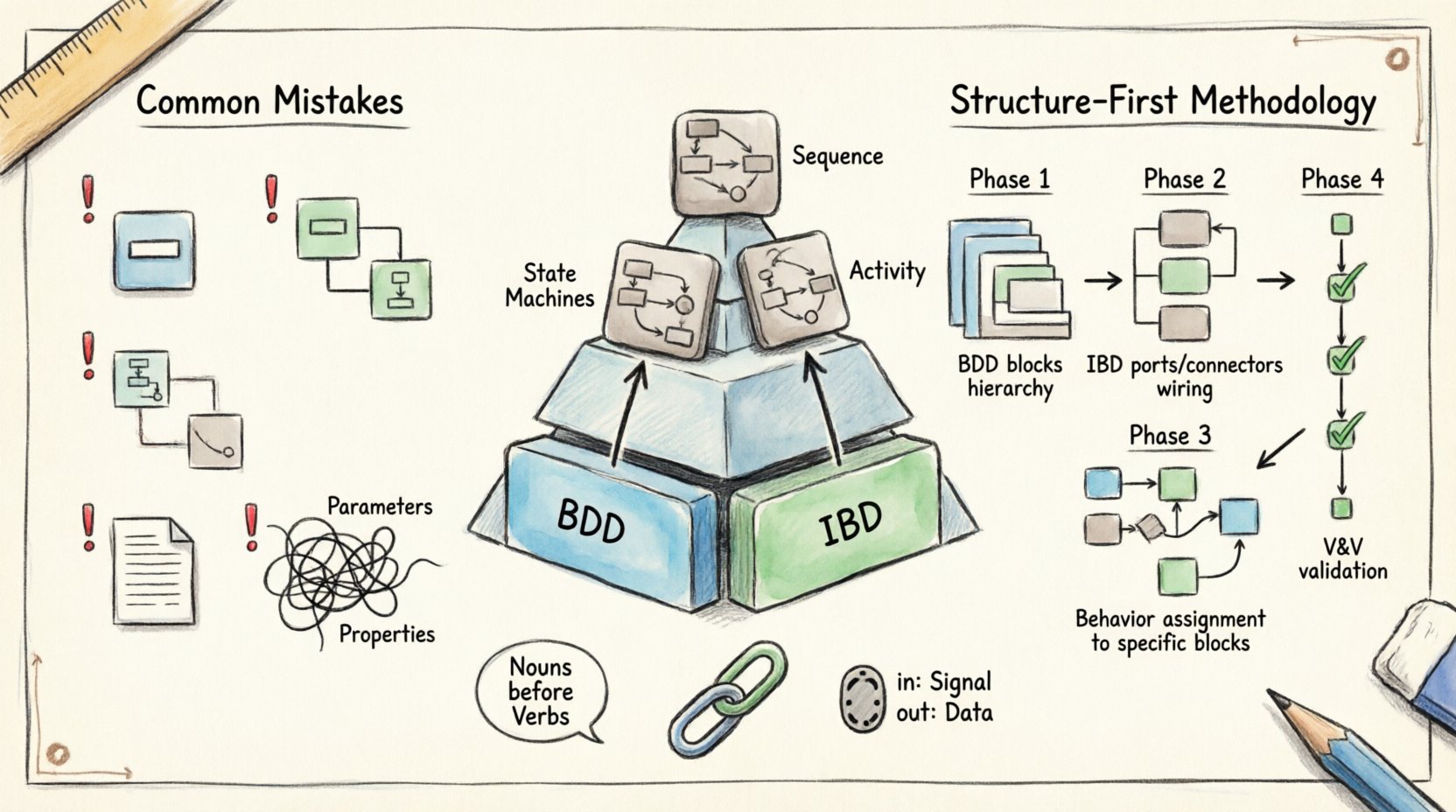
構造優先アプローチ 🛠️
これらの罠を避けるため、システムの静的定義を優先する規律あるワークフローを採用してください。
フェーズ1:ブロック定義図(BDD) 🧱
まずブロックを定義します。主要なサブシステムをリストアップし、それらの間の関係(構成、集約、関連)を定義します。これにより階層構造が確立されます。
-
トップレベルのシステムを特定します。
-
主要なコンポーネントに分解します。
-
関係の種類を定義します(例:~の一部である、使用する)。
-
まだ行動を追加しないでください。システムの「名詞」に注目してください。
フェーズ2:内部ブロック図(IBD) 🕸️
ブロックが定義されたら、それらがどのように接続されるかを定義します。これがシステムの配線図です。
-
トップレベルブロック用のIBDを作成します。
-
外部とのインタラクションが必要な各ブロックに対してポートを定義します。
-
ポートを接続器で接続します。型が一致していることを確認してください。
-
ブロック境界を越えるアイテムに対して参照プロパティを定義します。
フェーズ3:行動定義 🎬
舞台が整ったので、行動を定義します。行動をその所属する特定のブロックに割り当てます。
-
異なるモードを持つブロックに対して状態機械を作成する。
-
フローを処理するブロックに対してアクティビティ図を作成する。
-
アクションがフェーズ2で定義されたポートを参照していることを確認する。
-
動作を要件にリンクしてカバレッジを確保する。
フェーズ4:検証と検査 🧐
モデルが完成したら整合性を確認する。動作が構造と矛盾しないことを確認する。たとえば、存在しないポートでイベントを発生させることはできない。
-
利用可能な場合、モデルの整合性チェックを実行する。
-
制御フローについて手動レビューを行う。
-
すべての要件が少なくとも1つのモデル要素にトレースされていることを確認する。
検証と検査(V&V)への影響 ✅
構造を最優先するアプローチは、検証と検査を大幅に支援する。構造が明確であれば、物理インターフェースに基づいてテストケースを生成できる。これにより、開発サイクルの後半に統合問題が発生するリスクが低減される。
-
構造的検証:すべての部品が適切に計上され、正しく接続されていることを確認する。
-
動作的検証:構造的制約のもとで、論理が意図した通りに実行されることを確認する。
-
インターフェース検証:サブシステム間で信号やデータが正しく流れることを確認する。
強固な構造がなければ、V&Vは当てずっぽうのゲームになる。物理的なハードウェアがそれをサポートできるかどうかを知らないまま動作を検証していることになる。
コミュニケーションの利点 🗣️
明確な構造はステークホルダー間のコミュニケーションを向上させる。エンジニア、マネージャ、顧客のすべてが、システム構成の明確な視点を得ることで恩恵を受ける。
-
エンジニア:どのブロックを実装すべきかを正確に把握する。
-
マネージャ:作業の範囲と境界を理解する。
-
顧客:納品物を具体的に把握できる。
動作図だけでは、技術的でないステークホルダーにとってしばしば抽象的すぎる。構造図は、プロジェクトの規模と複雑さを理解するための必要な文脈を提供する。
長期的な保守 🛠️
モデルは生きている文書である。システムが進化するにつれてモデルも進化する。構造を最優先するモデルは、コアコンポーネントが安定しているため、保守が容易である。動作は頻繁に変化するが、構造はそれほど頻繁に変化しない。
-
要件が変更されたら、まず動作を更新する。
-
構造を変更する必要がある場合、動作は構造にリンクされているため自動的に更新されます。
-
依存関係が明確な場合、リファクタリングは容易になります。
モデル整合性についての最終的な考察 🧩
構造を動作の前にモデル化する選択は単なる好みではなく、堅牢なシステム工学のための必須事項です。構造的な基盤なしに動作を過剰にモデル化すると、検証や保守が困難な脆弱な成果物が生じます。
Blocksおよび内部ブロック図を優先する規律あるワークフローに従うことで、チームはモデルが信頼できる真実の源となることを確保できます。このアプローチによりリスクが低減され、明確性が向上し、開発ライフサイクル全体でのより良い協働が促進されます。
思い出してください。モデルは現実の表現です。現実は構造を持っています。したがって、モデルはまず構造を定義しなければなりません。その上で初めて動作を正確に記述できるのです。
主なポイント 📌
-
常に状態やアクティビティを定義する前に、Blocks(BDD)を定義する。
-
インターフェースとデータフローを定義するために内部ブロック図を使用する。
-
トレーサビリティのために、すべてのモデル要素を要件にリンクする。
-
内部プロパティと外部パラメータを分離する。
-
動作の精緻化を行う前に、モデル構造を検証する。
-
オブジェクト構造が安定するまで、シーケンス図の作成を避ける。
-
「名詞」(構造)に注目し、その後に「動詞」(動作)に注目する。
これらの実践を採用することで、より高品質なモデルとより成功したシステム実装が実現します。信頼性の高いシステムへの道は、堅固な構造的基盤によって舗装されています。