











システムモデリング言語(SysML)に関する包括的なガイドへようこそ。システムエンジニア、ソフトウェアアーキテクト、あるいは複雑なシステム設計の分野に進出しようとしている学生であっても、行動モデリングを理解することは不可欠です。このチュートリアルでは、最も重要な図の種類の2つに焦点を当てます:相互作用図と状態機械図です。それらの目的や構造、特定の独自ツールに依存せずに、ゼロから作成する方法について探求します。
SysMLと行動モデリングの紹介 🚀
システムモデリング言語(SysML)は、システム工学の応用を目的とした汎用的なモデリング言語です。ユニファイドモデリング言語(UML)に基づいていますが、システム工学の広範な範囲に対応するように調整されています。UMLはソフトウェアに重点を置く一方、SysMLは構造、行動、要件、制約を統合しています。
行動モデリングはSysMLの中心的な構成要素です。システムが刺激に応じて時間とともにどのように変化するかを記述します。SysMLでは、行動を表現する主な方法は2つあります:
- 相互作用図:オブジェクト間のメッセージの流れに注目し、時間の経過とともにその流れを示します。
- 状態機械図:単一のオブジェクトのライフサイクルと、イベントに対してどのように反応するかに注目します。
それぞれの図の種類をいつ使うべきか理解することは、効果的なモデリングの第一歩です。複数の参加者を含む複雑なシーケンスには、相互作用図が最適です。特定のコンポーネントの内部論理を定義するには、状態機械図が理想的です。
相互作用図の理解 💬
相互作用図は、オブジェクト間のメッセージのやり取りを描写します。時間的であるため、特定の順序でイベントを示します。SysMLでは、主な相互作用図はブロック定義図(BDD)コンテキストと内部ブロック図(IBD)コンテキストですが、具体的な行動的視点としては、通常はシーケンス図または通信図が用いられます。
このチュートリアルでは、相互作用の順序に焦点を当て、通常はシーケンス図として可視化されます。
相互作用図の主要な構成要素
- ライフライン:オブジェクトの時間的な存在を表す垂直線。
- メッセージ:ライフライン間の情報またはコマンドの流れを示す矢印。
- アクティベーションバー:ライフライン上の長方形のボックスで、オブジェクトがアクティブに動作している時間を示します。
- 結合断片:メッセージのシーケンスの処理方法を定義するボックス(例:ループ、選択)。
相互作用図を使用するタイミング
| シナリオ | 図の種類 |
|---|---|
| システムが起動し、データをデータベースに送信する | 相互作用図 |
| モジュール内の特定のエラー状態を処理する | 状態機械図 |
| 複数のサブシステムが同時に通信する | 相互作用図 |
| 単一センサーのライフサイクルの定義 | 状態機械図 |
ステップバイステップ:あなたの最初の相互作用図の作成 📝
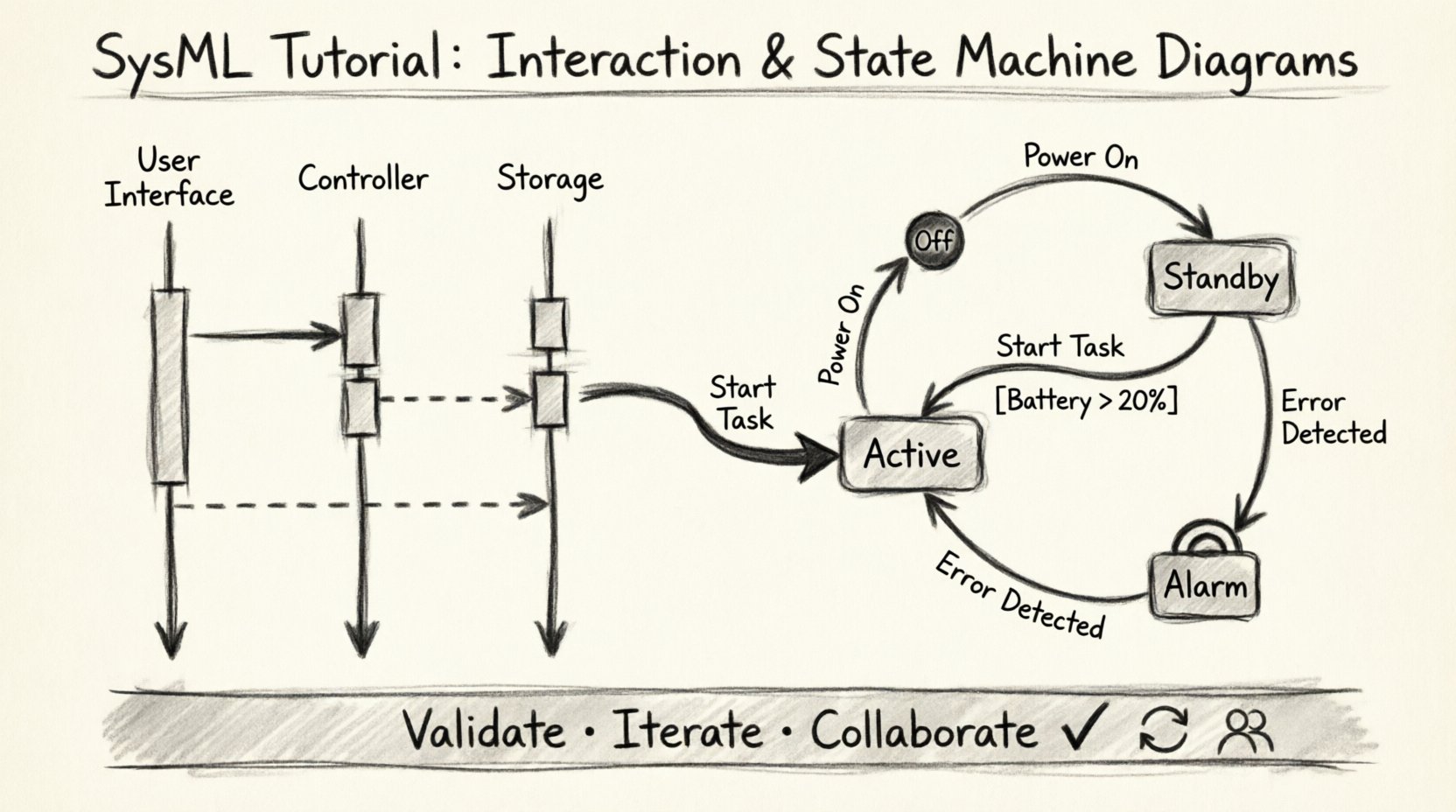
一般的なシステムのための簡単な相互作用図を作成しましょう。ユーザーがデータを要求し、コントローラーがそれを処理し、ストレージユニットがそれを保存するシステムを想像してください。
ステップ1:参加者(ライフライン)の定義
まず、関与するオブジェクトを特定します。SysMLでは、これらは通常ブロックとして表現されます。私たちの例では:
- ユーザーインターフェースブロック:リクエストのエントリポイント。
- コントローラーブロック:論理プロセッサ。
- ストレージブロック:データリポジトリ。
各ブロックに対して垂直線を描きます。線の上部にブロック名をラベル付けします。これがあなたのライフラインです。
ステップ2:メッセージの定義
メッセージは相互作用を表します。これらは送信者のライフラインから受信者のライフラインへと流れます。
- データ要求:ユーザーインターフェースからコントローラーへ矢印を描きます。ラベルを「データ要求」とします。
- データ処理:コントローラーからストレージブロックへ矢印を描きます。ラベルを「レコード取得」とします。
- 結果の返却:ストレージブロックからコントローラーへ破線の矢印を描きます。ラベルを「データ応答」とします。
- 表示:コントローラーからユーザーインターフェースへ破線の矢印を描きます。ラベルを「結果を表示」とします。
ステップ3:アクティベーションバーの追加
アクティベーションバーは、オブジェクトがアクションを実行している期間を示します。オブジェクトがアクティブな場所のライフライン上に細い長方形を配置します。
- 「データ要求」が到着したタイミングから、コントローラーのライフライン上にアクティベーションバーを配置します。
- 「レコード取得」が到着したタイミングから、ストレージブロックのライフライン上にアクティベーションバーを配置します。
- コントローラーのアクティベーションバーを、「結果を表示」が送信されるまで延長します。
ステップ4:時間による精緻化
インタラクション図は時間に敏感です。メッセージが垂直に順序付けられていることを確認してください。図の上部は最も早い時間を表し、下部は最も遅い時間を表します。2つのメッセージが同時に発生する場合は、同じ水平位置に配置する必要があります。
深掘り:状態機械図 ⚙️
インタラクション図はオブジェクト同士のやり取りを示すのに対し、状態機械図はオブジェクトの思考を示します。オブジェクトが取りうるさまざまな状態と、それらの状態間の遷移を記述します。
状態機械のコアコンセプト
- 状態:オブジェクトの寿命中に、ある条件を満たす、ある活動を実行する、またはあるイベントを待つ状態。
- 遷移:一つの状態から別の状態への移動。これはイベントによって引き起こされる。
- イベント:特定の時間に発生する出来事で、遷移を引き起こす。
- ガード条件:遷移が発生するためには、真でなければならないブール式。
- 初期状態:状態機械の出発点(通常は黒い実心円)。
- 最終状態:状態機械の終了点(通常は輪を囲んだ黒い円)。
なぜ状態機械を使うのか?
状態機械は、明確な動作モードを持つシステムにとって不可欠です。たとえば、バッテリー駆動のデバイスには「充電中」「放電中」「スリープ中」などの状態があるかもしれません。デバイスの動作は、その状態によって異なります。
ステップバイステップ:状態機械図の作成 🛠️
一般的な「電源管理システム」のための状態機械を作成しましょう。
ステップ1:状態の定義
明確な動作モードを特定します。私たちの電源システムでは:
- オフ:システムは電源が切れている。
- スタンバイ:システムは準備ができているが、完全にアクティブではない。
- アクティブ:システムは主な機能を実行している。
- アラーム:エラーまたは警告状態が存在する。
各状態に対して丸みを帯びた長方形を描き、その中に名前を書く。
ステップ2:遷移を定義する
遷移は状態をつなぐ。矢印で表される。変化を引き起こすイベントを矢印にラベル付けする。
- オフからスタンバイへ: イベント:「電源オン」。
- スタンバイからアクティブへ: イベント:「タスク開始」。
- アクティブからスタンバイへ: イベント:「タスク一時停止」。
- アクティブからアラームへ: イベント:「エラー検出」。
- アラームからスタンバイへ: イベント:「システムリセット」。
ステップ3:初期状態と終了状態を追加する
すべての状態機械はどこかで開始しなければならない。黒い実線の円を描き、それを「スタンバイ」状態に矢印でつなぐ(システムがスタンバイ状態で起動すると仮定)。この遷移に「ブート」とラベルを付ける。
終了状態を定義する。システムが完全にシャットダウンする場合、状態を輪を描いた黒い円に接続する。これを「シャットダウン」とラベル付ける。
ステップ4:ガード条件を組み込む
すべての遷移が自動的に発生するわけではない。ときには、条件を満たす必要がある。例えば、「スタンバイ」から「アクティブ」への移行には、バッテリー残量の確認が必要な場合がある。
- 「スタンバイからアクティブ」への遷移にガード条件を追加する。
- ラベルを付ける:[バッテリー残量 > 20%]。
- バッテリー残量が低い場合、遷移は発生せず、システムはスタンバイ状態のままとなる。
ステップ5:エントリーアクションとエグジットアクションを追加する
状態に入ったり出たりするときに、アクションを実行できる。
- エントリーアクション:状態に入ったら直ちに実行されるアクション。表記法として「entry / [アクション]」を使用する。
- エグジットアクション:状態を離れる直前に実行されるアクション。表記法として「exit / [アクション]」を使用する。
たとえば、「アクティブ」状態では:
- エントリー:「センサーを初期化」。
- エグジット:「設定を保存」。
振る舞いと構造の統合 🔄
状態機械と相互作用図は孤立して存在しない。システムの構造にリンクされなければならない。SysMLでは、このリンクは内部ブロック図(IBD)とシーケンス図を通じて達成される。
状態機械をブロックにリンクする
特定のブロックを記述する状態機械図を作成するには:
- ブロック定義図にブロックを作成する。
- 状態機械図を作成する。
- 「振る舞い要件」または「状態機械」の関係を使用して、図をブロックに関連付ける。
- これにより、「電力管理システム」ブロックをモデル化する際、状態機械がその内部論理を定義することを保証する。
相互作用図を状態機械にリンクする
相互作用図内のメッセージは、しばしば状態機械の遷移を引き起こす。
- 相互作用図に「タスク開始」メッセージがコントローラに到着している場合、
- コントローラの状態機械には、「タスク開始」によってトリガーされる遷移が存在するべきである。
- これにより、外部通信が内部論理を駆動するスムーズなモデルが構築される。
一般的な課題と解決策 🛑
複雑なシステムをモデル化すると曖昧さが生じる。SysML図作成中に発生する一般的な問題とその解決方法を以下に示す。
問題1:状態が多すぎる
問題:状態機械が読み取れないほど複雑な矢印のネットワークになってしまう。
- 解決策:複合状態を使用する。関連する状態を大きなボックス内にグループ化する。たとえば、「エラー」状態すべてを「障害処理」という親状態の下にグループ化する。
問題2:循環依存
問題:状態Aが状態Bを必要とし、状態Bが状態Aを必要とするため、解決されないループが発生する。
- 解決策:論理を再検討する。明確な入力ポイントと明確な終了条件があることを確認する。ガード条件を使用して、潜在的な無限ループを回避する。
問題3:メッセージの意味が不明瞭
問題:相互作用図において、メッセージが実際に何を意味するのかが不明瞭である。
- 解決策:要件にメッセージを定義する。メッセージ名がブロックインターフェースで定義された操作と一致していることを確認する。
問題4:タイミングの衝突
問題:メッセージが、システムが相互作用図内で処理できる速度よりも速く到着する。
- 解決策: 構造にバッファまたはキューを追加する。これらの要素を、バッファ用の別々のライフラインを使用して、相互作用図で表現する。
モデルの検証 ✅
図が描かれた後は、検証が必要である。検証により、モデルがシステム要件を正確に表現していることが保証される。
整合性の確認
- 名前の一貫性: 相互作用図内のブロック名が、状態機械内のブロック名と一致していることを確認する。
- イベントの一貫性: 相互作用図内のすべてのイベントに対して、状態機械に対応するトリガーが存在することを確認する。
- 状態の完全性: 最終状態でない限り、すべての状態に明確な退出経路が存在することを確認する。
トレーサビリティ
図のすべての要素を要件にリンクする。これにより、モデルが設計意図を満たしていることを確認できる。
- 「電源オン」イベントを要件「システムは電源ボタンに応答しなければならない」にトレースする。
- 「アラーム」状態を要件「システムは重大なエラーを報告しなければならない」にトレースする。
シミュレーションと分析
高度なモデリング環境では、これらの図をシミュレートできる。
- 実行のトレース: メッセージが相互作用図を通過する経路を追跡する。
- 状態カバレッジ: 状態機械内のすべての状態に到達可能であることを確認するために、シミュレーションを実行する。
- デッドロック検出: システムが前進できない状態が存在するかどうかを確認する。
モデリング実践に関する結論 📚
SysML図の作成は、練習を重ねるほど向上するスキルである。相互作用図および状態機械図を習得することで、複雑なシステム動作を明確に可視化できるようになる。モデルを単純に、一貫性を持たせ、要件にトレーサブルであるように心がけよう。
- 小さなステップから始める: システム全体を統合する前に、1つのコンポーネントをモデル化する。
- 反復する: 要件が進化するにつれて、図を段階的に改善する。
- 協働する: 図をステークホルダーとのコミュニケーションツールとして活用する。
これらの基盤となるステップを踏んだことで、あなたはエンジニアリングプロジェクト用の堅牢な行動モデルを構築する準備が整いました。システムの複雑さが増すにつれて、SysMLのより深い機能をさらに探求し続けてください。