











L’ingénierie des systèmes basée sur les modèles (MBSE) transforme la manière dont les systèmes complexes sont définis, conçus et vérifiés. Elle déplace l’attention des processus centrés sur les documents vers des flux de travail centrés sur les modèles. Le langage de modélisation des systèmes (SysML) constitue la base de ce changement, offrant une méthode normalisée pour représenter la structure du système, son comportement et ses exigences. Toutefois, la transition d’un schéma conceptuel vers un modèle fonctionnel révèle souvent des lacunes que la documentation statique dissimule.
Ce guide explore une étude de cas pratique portant sur un système d’ascenseur. Bien que le concept paraisse simple, le processus de modélisation en SysML met au jour des problèmes comportementaux complexes, des contraintes temporelles et des ambiguïtés d’interfaces. En analysant cet exemple, nous examinons comment les pratiques rigoureuses de modélisation révèlent des complexités cachées essentielles à la sécurité et à la fiabilité.
🏗️ Comprendre la structure du système
La première étape de la modélisation SysML consiste à définir les limites du système et sa composition. Pour un ascenseur, la structure n’est pas simplement un ascenseur qui monte et descend. Elle implique plusieurs sous-systèmes interagissant par le biais d’interfaces définies.
1.1 Diagramme de définition de bloc (BDD) 🧩
Un diagramme de définition de bloc établit les types d’objets au sein du système. Dans ce scénario, nous définissons les blocs principaux suivants :
- Système d’ascenseur : Le conteneur de niveau supérieur.
- Cabine : Le compartiment des passagers.
- Porte : Le mécanisme d’accès.
- Moteur : L’unité de propulsion.
- Contrôleur : L’unité logique gérant les opérations.
- Bouton d’appel : L’interface utilisateur pour l’entrée.
Ces blocs sont liés par des relations de généralisation et de composition. Par exemple, le système d’ascenseur est composé d’une cabine, d’une porte et d’un moteur. Cette définition structurelle garantit qu’à chaque composant physique correspond un élément de modèle.
1.2 Diagramme interne de bloc (IBD) 🔄
Alors que le BDD définit les types, le diagramme interne de bloc définit les instances et les connexions. C’est ici que le flux de données et d’énergie est spécifié.
- Ports : Définissent les points d’interaction. Par exemple, le moteur nécessite un port d’alimentation, tandis que le contrôleur nécessite un port de signal.
- Propriétés de flux : Définissent ce qui circule entre les ports. Les signaux électriques circulent du bouton d’appel vers le contrôleur. La puissance mécanique circule du moteur vers la cabine.
- Références : Lien entre les composants et leurs blocs respectifs.
La création d’un IBD détaillé oblige l’ingénieur à préciser exactement comment le contrôleur communique avec la porte. S’agit-il d’un lien physique direct ou d’un signal logique ? Cette distinction est souvent perdue dans les exigences rédigées en texte, mais devient explicite dans le modèle.
🧠 Modélisation du comportement avec des machines à états
La structure seule ne définit pas la fonctionnalité. SysML utilise des diagrammes d’états-machine pour modéliser le comportement dynamique du système. C’est ici que l’étude de cas de l’ascenseur commence à révéler une complexité significative.
2.1 Définition des états ⏸️
Une machine à états représente le cycle de vie d’un bloc spécifique ou du système dans son ensemble. Les états courants pour un ascenseur incluent :
- Inactif :En attente d’un appel.
- Porte ouverte :Accessible aux passagers.
- Fermeture de la porte :Transition vers un état fermé.
- Montée en cours :Montée vers un étage.
- Descente en cours :Descente vers un étage.
- Arrêté :Arrivé à un étage, portes fermées.
Chaque état représente un état stable où le système effectue des activités spécifiques ou attend un événement.
2.2 Transitions et événements ⚡
Les transitions ont lieu lorsqu’un événement est déclenché. Les événements peuvent être externes (appui sur un bouton) ou internes (signal d’un capteur). Les gardes déterminent si une transition est autorisée.
Considérez la transition depuis Porte ouverte vers Fermeture de la porte:
- Événement :Le minuteur expiré ou le signal de porte fermée.
- Garde :Aucune obstruction détectée dans l’ouverture de la porte.
- Action :Activer le moteur de porte.
Ici, le modèle révèle un problème potentiel. Si la condition de garde dépend uniquement d’un minuteur, le système pourrait fermer la porte sur un passager. Si elle dépend uniquement d’un capteur d’obstruction, la porte pourrait ne jamais se fermer si le capteur est défectueux. Le modèle oblige l’ingénieur à définir la logique de priorité entre ces entrées conflictuelles.
🕸️ Le piège de la complexité : le timing et les interactions
La valeur la plus importante de cette étude de cas réside dans la découverte des problèmes de timing. Une machine à états simple suppose souvent des transitions instantanées, mais les systèmes du monde réel fonctionnent en temps continu.
3.1 Conditions de course ⏱️
Une condition de course se produit lorsque le comportement du système dépend de la séquence ou du timing des événements. Dans le modèle d’ascenseur, envisagez le scénario où un passager appuie sur un bouton d’étage pendant que la porte se ferme.
Scénario A : L’appui sur le bouton est traité avant que la porte ne soit complètement fermée. Le système ouvre la porte et se rend à l’étage demandé.
Scénario B : La porte se ferme complètement avant que l’appui sur le bouton ne soit enregistré. Le système ne se rend à l’étage demandé qu’après avoir terminé le trajet en cours.
Sans simulation ou sans contraintes de timing précises dans le modèle, ces deux résultats sont indiscernables. Les diagrammes d’activité SysML peuvent aider à visualiser la séquence des actions, mais les machines à états doivent être annotées avec des contraintes de timing pour éviter toute ambiguïté.
3.2 Scénarios d’interblocage 🚫
Un interblocage se produit lorsque le système entre dans un état où aucune transition ultérieure n’est possible. Il s’agit d’un mode de défaillance critique.
Dans le modèle d’ascenseur, un interblocage pourrait survenir si :
- La cabine est entre deux étages.
- La porte est verrouillée.
- Le moteur est éteint.
- Aucun appel d’urgence n’a été enregistré.
Si la puissance tombe en panne dans cet état, le système ne peut pas bouger. Le modèle doit inclure un État d’alimentation d’urgence ou un Mode de secours qui remplace la logique standard. Identifier cette exigence tôt dans la phase de modélisation évite des modifications matérielles coûteuses plus tard.
3.3 Mauvaises correspondances d’interfaces 📡
Un comportement complexe provient souvent de mauvaises correspondances entre les sous-systèmes. Le contrôleur envoie un signal au moteur. Le moteur attend une plage de tension spécifique. Le modèle doit définir le contrat d’interface.
| Élément d’interface | Valeur attendue | Variabilité du monde réel | Risque |
|---|---|---|---|
| Latence du signal | < 50 ms | Variable en raison des câblages | Délai de sécurité de la porte |
| Tension d’alimentation | 24 V CC | 20 V – 28 V | Blocage du moteur |
| Capteur de porte | Binaire (On/Off) | Bruit analogique | Signal faux ouvert |
En cartographiant ces interfaces dans le IBD, l’ingénieur peut voir où une dégradation du signal pourrait se produire. Cette visibilité est impossible avec un document de spécifications plat.
🔍 Vérification et traçabilité
L’une des promesses fondamentales du MBSE est la traçabilité. Chaque élément du modèle doit être lié à une exigence et avancer vers un cas de test. Le modèle d’ascenseur démontre toute la puissance de ce lien.
4.1 Affectation des exigences 📋
Les exigences ne sont pas seulement du texte ; elles sont des contraintes sur le modèle. Par exemple :
- REQ-01 : L’ascenseur doit répondre à une demande dans les 3 secondes.
- REQ-02 : La porte ne doit pas se fermer si une obstruction est détectée.
Dans le modèle, REQ-01 contraint le temps de transition de la machine d’états. REQ-02 contraint la condition de garde sur la transition de fermeture de la porte. Si le modèle ne peut pas satisfaire une contrainte, l’exigence est marquée comme non vérifiée.
4.2 Simulation et validation 🎮
Les modèles statiques sont statiques. Pour vérifier le comportement, le modèle doit être simulé. La simulation permet à l’ingénieur d’injecter des événements et d’observer la réponse du système.
Étapes de simulation :
- Initialisez le système dans l’état Inactif état.
- Déclenchez un événement Demande d’appel à l’étage 3.
- Observez la transition vers Montée en cours.
- Injecter un Obstruction événement pendant Porte en cours de fermeture.
- Vérifier que le système revient à Porte ouverte.
Si la simulation échoue à l’étape 5, la logique du modèle est incorrecte. Cette boucle de rétroaction permet une amélioration itérative avant la construction de tout matériel physique.
🛠️ Pièges courants dans la modélisation
Même avec un cas d’étude clair, les ingénieurs introduisent souvent des erreurs dans le modèle SysML. Reconnaître ces pièges est essentiel pour préserver l’intégrité du modèle.
5.1 Sur-abstraction 🌫️
Créer un modèle trop abstrait cache des détails essentiels. Si le bloc Motor est traité comme une boîte noire sans comportement interne, l’ingénieur ne peut pas vérifier son temps de réponse. Le modèle doit être suffisamment détaillé pour soutenir le niveau d’analyse requis.
5.2 Sous-abstraction 🧱
À l’inverse, modéliser chaque vis et boulon est inefficace. Le modèle doit se concentrer sur le comportement au niveau du système pertinent pour l’étape actuelle du développement. La granularité doit correspondre à l’étape du projet.
5.3 Notation incohérente 📝
Utiliser des conventions différentes pour nommer les états ou les blocs crée de la confusion. Une convention de nommage standardisée est essentielle. Par exemple, nommer toujours les états au présent (par exemple, Porte fermée au lieu de Porte en cours de fermeture pour l’état lui-même).
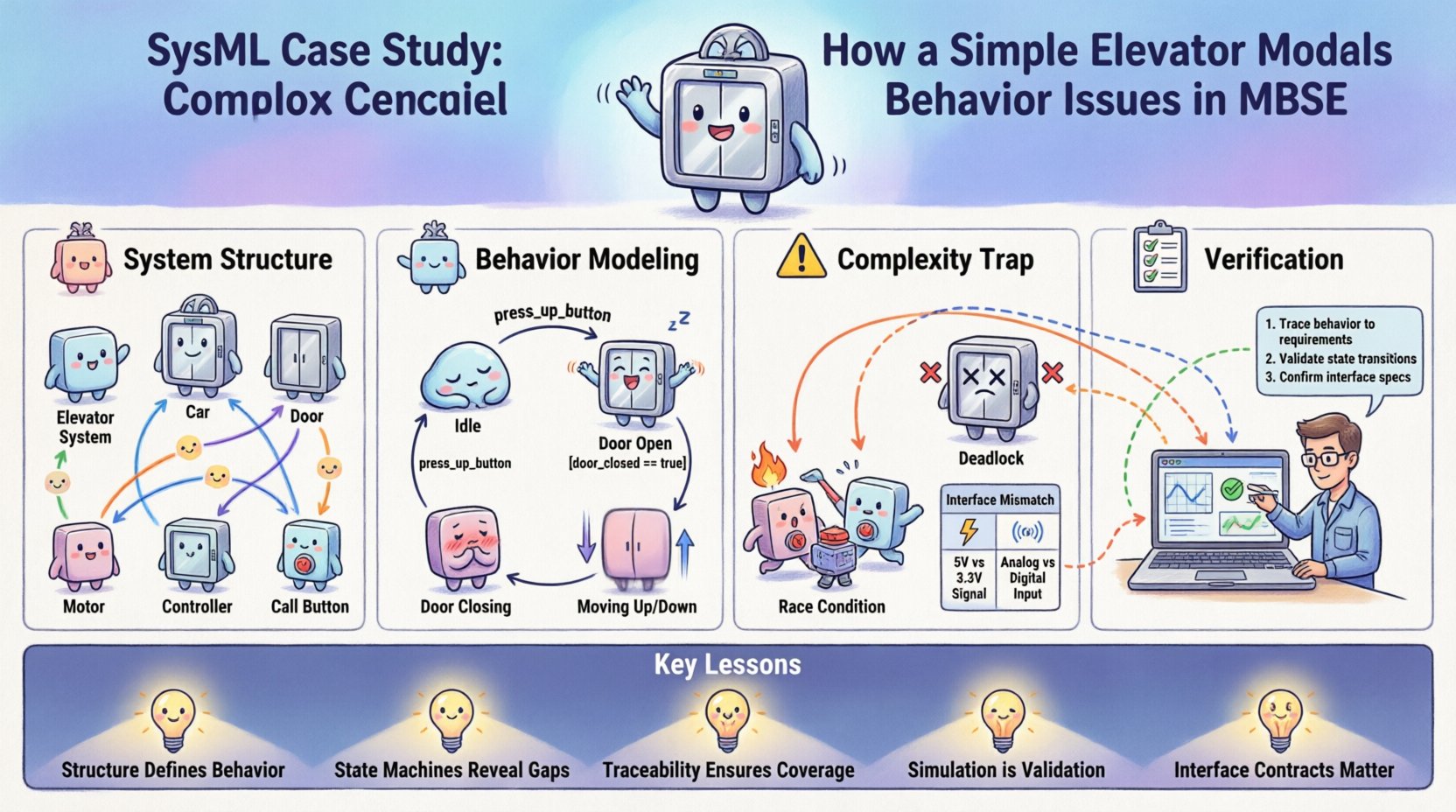
📈 Leçons tirées du modèle de l’ascenseur
Cette étude de cas met en évidence plusieurs enseignements clés pour l’ingénierie des systèmes.
- La structure définit le comportement : Vous ne pouvez pas modéliser un comportement sans une structure définie. L’IBD détermine les interactions disponibles.
- Les machines à états révèlent les lacunes logiques : Définir explicitement les états oblige l’ingénieur à envisager des cas limites comme la perte de courant ou la défaillance du capteur.
- La traçabilité garantit une couverture complète : Lier les exigences aux éléments du modèle garantit qu’aucune contrainte de sécurité n’est négligée.
- La simulation est la validation :Exécuter le modèle est la seule façon de vérifier la logique de temporisation et d’interaction.
- Les contrats d’interface comptent :Définir les ports et les flux empêche les problèmes d’intégration entre les sous-systèmes.
🚀 Avancer dans le MBSE
L’exemple de l’ascenseur est un microcosme des systèmes plus grands. Que l’on conçoive un vaisseau spatial, un système de freinage automobile ou un dispositif médical, les principes restent les mêmes. La complexité n’est pas éliminée par l’abstraction ; elle est gérée grâce à une modélisation rigoureuse.
À mesure que les projets grandissent en échelle, la discipline du SysML devient encore plus cruciale. Elle fournit une source unique de vérité qui aligne les équipes ingénierie, logicielles et matérielles. En traitant le modèle comme un artefact vivant plutôt qu’un schéma statique, les organisations peuvent réduire les risques et améliorer la qualité des produits.
Le parcours allant d’un simple schéma à une simulation vérifiée exige de la patience et de la précision. Mais les insights obtenus concernant le comportement, la temporisation et l’interaction sont inestimables. Ils transforment le processus d’ingénierie d’un exercice de tâtonnement en une chaîne de travail prévisible et vérifiable.
En fin de compte, l’objectif n’est pas seulement de construire un système qui fonctionne, mais de construire un système qui est compris. Le modèle est la compréhension. La simulation est la preuve. Et les exigences sont la promesse.