











La modélisation des systèmes ressemble souvent à la navigation dans un labyrinthe de boîtes et de flèches. Alors que les diagrammes de structure définissent ce dont est composé un système, les diagrammes de comportement définissent ce qu’un système fait. Parmi ceux-ci, le diagramme de machine à états se distingue comme l’outil principal pour capturer le comportement dynamique d’un système. Ce n’est pas simplement un organigramme ; c’est un moteur logique qui détermine comment un système réagit aux événements au fil du temps. Comprendre la logique cachée de ces diagrammes est essentiel pour assurer une conception robuste du système.
Ce guide explore les mécanismes des machines à états SysML. Nous allons aller au-delà de la syntaxe basique pour examiner les décisions architecturales qui déterminent la fiabilité du système. Des hiérarchies imbriquées aux régions concurrentes, les détails comptent. La précision dans la modélisation se traduit directement par une précision dans la mise en œuvre.
Pourquoi les machines à états définissent l’intégrité du système 🔒
Les systèmes modernes sont rarement linéaires. Ils fonctionnent en modes, gèrent les exceptions et conservent la mémoire des événements passés. Une simple séquence d’étapes ne peut pas capturer la complexité d’un système qui doit pouvoir s’interrompre, reprendre ou réagir différemment selon son état actuel. Les machines à états fournissent le formalisme nécessaire pour décrire ces conditions.
Lors de la modélisation d’un système complexe, se fier uniquement aux diagrammes d’activité peut entraîner une ambiguïté. Les diagrammes d’activité montrent le flux, mais ils ne suivent pas intrinsèquement l’état. Les machines à états comblent cette lacune en définissant explicitement l’état du système à tout moment donné. Cette distinction est cruciale pour les systèmes critiques pour la sécurité, les contrôleurs embarqués et les architectures distribuées.
Les principaux avantages de l’utilisation des machines à états incluent :
- Définition explicite des états : Chaque condition dans laquelle le système peut exister est visuellement représentée.
- Logique déclenchée par des événements : Les déclencheurs de changement sont clairement associés aux transitions.
- Préservation de l’historique : La capacité de se souvenir des configurations précédentes lors de l’entrée.
- Concurrence : Modélisation de plusieurs comportements indépendants se produisant simultanément.
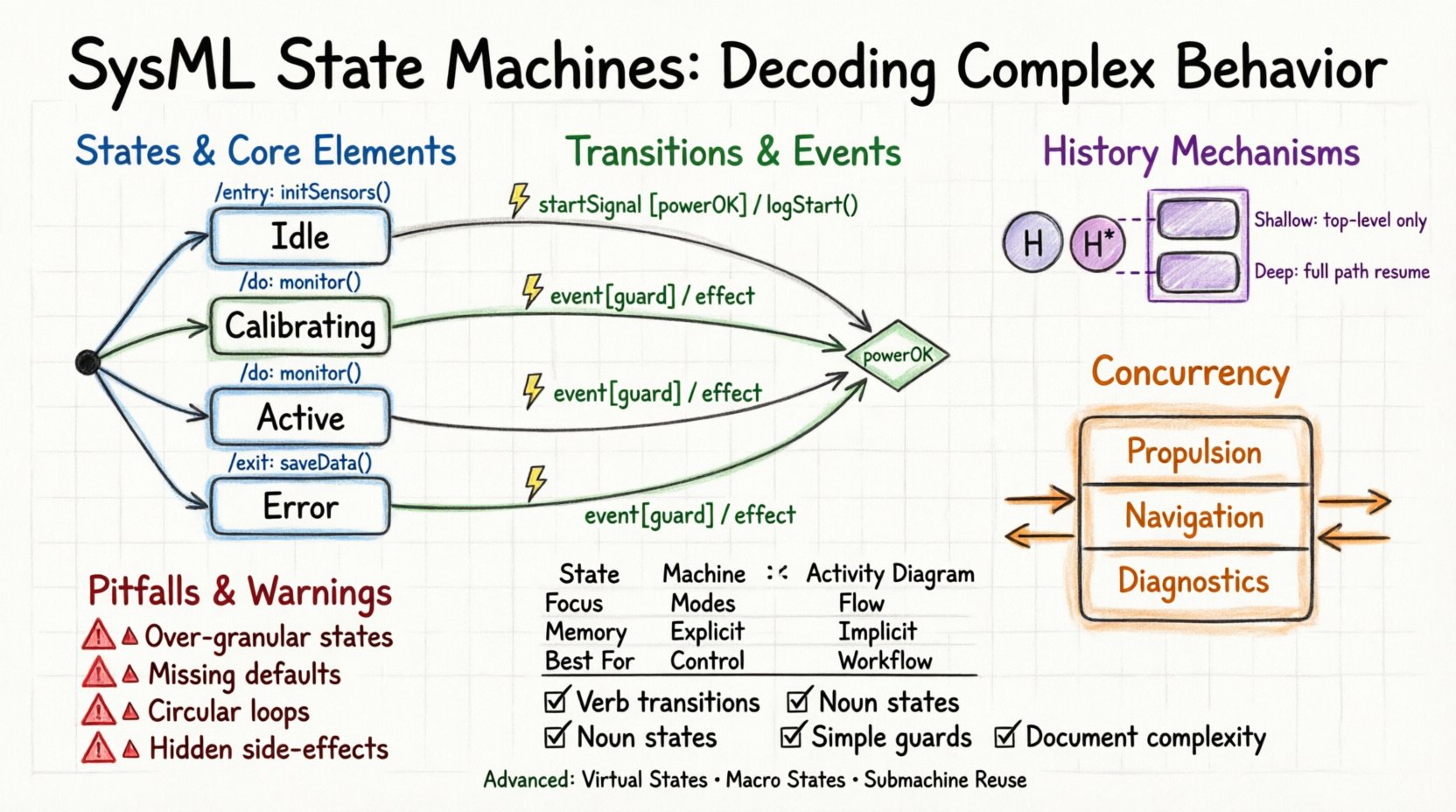
Anatomie fondamentale d’une machine à états SysML 🏗️
Pour décoder la logique, il faut comprendre les blocs de construction fondamentaux. Une machine à états est composée d’états et de transitions. Ces éléments interagissent à travers des événements et des gardes. Une compréhension claire de chaque composant empêche les erreurs de modélisation qui se propagent à la phase de conception.
États et points initiaux
Un état représente une condition durant laquelle le système satisfait un invariants, attend un événement ou effectue une activité. Le parcours commence au point initial. Il s’agit d’un cercle plein noir indiquant l’état de départ du système. À partir de là, la première transition doit partir pour définir le comportement d’entrée.
Transitions et événements
Une transition relie un état à un autre. Elle représente le changement d’état. Pour qu’une transition ait lieu, trois conditions doivent généralement être remplies :
- Événement : Quelque chose doit se produire (par exemple, l’arrivée d’un signal, l’expiration d’un minuteur).
- Condition de garde : Une expression booléenne qui doit évaluer à vrai.
- Effet : L’action effectuée pendant la transition (par exemple, enregistrement de données, envoi d’un message).
Actions d’entrée et de sortie
Les états nécessitent souvent des comportements spécifiques lors de leur entrée ou de leur sortie. Ceux-ci sont définis comme des actions d’entrée et de sortie.
- Action d’entrée (/entry) : Exécuté immédiatement lorsque l’état devient actif.
- Action de sortie (/exit) : Exécuté immédiatement avant de quitter l’état.
- Activité en cours : Une action continue effectuée tant que le système reste dans l’état.
Considérons un scénario où un système entre dans un état « Calibration ». L’action d’entrée pourrait initialiser les capteurs. L’activité en cours pourrait effectuer un contrôle continu. L’action de sortie pourrait enregistrer les données de calibration. Sans ces distinctions, le moment d’exécution des opérations devient flou.
Gérer l’historique d’état avec précision 🕰️
L’une des fonctionnalités les plus puissantes de SysML est la capacité à suivre l’historique. Lorsqu’un système quitte un état complexe et revient plus tard, redémarre-t-il depuis le début ou reprend-il là où il s’était arrêté ? Cette décision définit le comportement du système en cas d’opération intermittente.
Historique superficiel vs. Historique profond
Les états d’historique permettent au système de se souvenir de sa configuration passée. Il existe deux types distincts :
- Historique superficiel : Se souvient de l’état de niveau supérieur au sein d’un état composite. Si le système revient, il entre dans le dernier sous-état de niveau supérieur, en ignorant les niveaux plus profonds.
- Historique profond : Se souvient de toute la trajectoire imbriquée. Si le système revient, il réentra dans le sous-état exact où il se trouvait, y compris tous les niveaux imbriqués.
Cette distinction est essentielle pour les systèmes qui subissent des changements de mode complexes. Un état d’historique profond garantit que le contexte de l’opération est préservé, réduisant ainsi la nécessité de routines de réinitialisation.
Implémentation de l’état d’historique
Dans le diagramme, un état d’historique est représenté par un cercle contenant une lettre « H ». Il est souvent relié à l’état par une transition déclenchée par un événement. Le choix entre un historique superficiel ou profond doit être clairement documenté, car il impacte la logique de récupération du système.
Concurrence via des régions orthogonales ⚡
Les systèmes rares fois fonctionnent dans une seule dimension. Un système de véhicule, par exemple, gère simultanément la propulsion, le freinage et la navigation. Ces comportements sont souvent indépendants mais se produisent au sein de la même instance système. SysML gère cela grâce aux régions orthogonales.
États de séparation et d’assemblage
Pour modéliser la concurrence, un état est divisé en plusieurs régions séparées par une barre épaisse. Cette barre agit comme une séparation. Lorsque le système entre dans l’état composite, il active toutes les régions simultanément. Une barre d’assemblage indique où ces régions se synchronisent.
Avantages de la modélisation orthogonale
- Découplage : Des préoccupations différentes sont modélisées séparément.
- Clarté : Réduit la complexité d’une machine à états monolithique unique.
- Évolutivité : De nouveaux comportements concurrents peuvent être ajoutés sans perturber la logique existante.
Toutefois, la concurrence introduit des risques de synchronisation. Les concepteurs doivent s’assurer que les ressources partagées sont correctement gérées entre les régions afin d’éviter les conditions de course.
Quand utiliser les machines à états plutôt que les diagrammes d’activité ⚖️
La confusion survient souvent entre les diagrammes d’états et les diagrammes d’activité. Les deux décrivent le comportement, mais leur portée diffère. Le choix de l’outil approprié dépend de la nature de la logique à modéliser.
| Fonctionnalité | Diagramme d’états | Diagramme d’activité |
|---|---|---|
| Focus principal | Modes et conditions du système | Flux de processus et algorithmes |
| Mémorisation de l’état | Explicite (mémoire de l’état actuel) | Implicite (les variables conservent les données) |
| Gestion des événements | Réactif (entraîné par des déclencheurs externes) | Proactif (entraîné par le flux de données) |
| Concurrence | Prise en charge native via des régions | Prise en charge via des forks/joins |
| Meilleur usage | Logique de contrôle, modes, états | Flux de travail, traitement des données |
Utilisez les machines à états lorsque le système doit attendre des événements ou maintenir des modes spécifiques. Utilisez les diagrammes d’activité lorsque l’accent est mis sur la séquence des opérations ou la transformation des données. Souvent, une approche hybride est nécessaire, où une activité déclenche une transition d’une machine à états.
Péchés courants de modélisation à éviter ⚠️
Même les modélisateurs expérimentés peuvent introduire de l’ambiguïté. Éviter les erreurs courantes garantit que le modèle reste une spécification fiable.
1. États trop granulaires
Créer un état pour chaque modification mineure d’une variable conduit à un diagramme dense et difficile à lire. Les états doivent représenter des conditions importantes du système, et non chaque point de données intermédiaire.
2. Absence de transitions par défaut
Chaque état doit prendre en compte les événements imprévus. Si un événement spécifique n’est pas défini pour un état, le comportement du système est indéfini. Des transitions par défaut ou des mécanismes généraux de gestion des états doivent être mis en œuvre pour gérer les exceptions.
3. Dépendances circulaires
Les transitions qui créent des boucles immédiates sans conditions de garde peuvent entraîner une exécution infinie. Assurez-vous que les boucles ont des conditions de sortie claires ou des clauses de garde.
4. Ignorer les effets d’entrée/sortie
Placer de la logique à l’intérieur d’un état sans définir les effets d’entrée ou de sortie peut masquer des effets secondaires. Précisez toujours ce qui se produit lorsqu’un état est activé ou désactivé.
5. Mélanges entre contrôle et flux de données
Les machines à états ne sont pas des diagrammes de flux de données. Bien qu’elles puissent déclencher des opérations sur les données, la logique principale doit être orientée vers le contrôle. Effectuez la manipulation des données dans des activités ou des diagrammes de séquence.
Intégration de la logique d’état avec les modèles structurels 🔗
Une machine à états n’existe pas en isolation. Elle interagit avec le modèle structurel du système. La machine à états doit faire référence aux composants, ports et signaux définis dans d’autres diagrammes.
Liens avec les composants
Les transitions invoquent souvent des opérations sur des composants spécifiques du système. Par exemple, une transition « Démarrer le moteur » pourrait invoquer une opération sur le composant « EngineController ». Ce lien garantit que le comportement est ancré dans l’architecture physique ou logique.
Propagation des signaux
Les événements dans les machines à états sont souvent des signaux. Ces signaux doivent être définis comme des flux de messages ou des spécifications d’interface. Il est crucial que les définitions des signaux correspondent aux attentes du récepteur pour assurer l’interopérabilité.
Meilleures pratiques pour un comportement de système clair 📝
Pour maintenir la clarté et l’autorité dans vos modèles, suivez les directives suivantes.
- Nommage cohérent :Utilisez des verbes d’action pour les transitions (par exemple, « DemanderDémarrage », « AnnulerProcessus ») et des noms pour les états (par exemple, « Inactif », « En traitement »).
- Hiérarchie visuelle :Utilisez des états composites pour regrouper la logique associée. N’embouteillez pas le niveau supérieur avec trop de transitions.
- Clarté des gardes :Maintenez les conditions de garde simples. Si une condition est complexe, définissez-la comme une propriété ou une fonction ailleurs.
- Documentation :Ajoutez des notes aux états complexes. Expliquez la justification derrière des configurations spécifiques.
- Boucles de revue :Revoyez régulièrement les machines à états avec les parties prenantes afin de garantir que la logique correspond aux exigences opérationnelles.
Modèles avancés pour une logique complexe 🚀
Au-delà des bases, SysML permet des modèles qui traitent des scénarios complexes.
États virtuels
Les états virtuels sont utilisés pour regrouper des états sans ajouter un nouveau niveau d’héritage. Ils aident à organiser le diagramme visuellement sans affecter les transitions logiques. Cela maintient le diagramme propre tout en conservant le regroupement logique.
États macro
Les états macro sont des états composites qui agissent comme un seul état dans une machine parente. Ils sont utiles pour l’abstraction. Vous pouvez définir une machine à états complexe comme un état macro et le référencer depuis un diagramme de niveau supérieur.
États sous-machine
Les états sous-machine vous permettent de référencer une machine à états externe entière. Cela favorise la réutilisation. Si plusieurs systèmes partagent la même logique d’authentification, concevez-la une fois en tant qu’état sous-machine et référencez-la là où nécessaire.
Conclusion sur les principes d’implémentation 📊
La logique d’un système est intégrée à son comportement. En maîtrisant les subtilités des machines à états, les concepteurs peuvent créer des spécifications robustes, maintenables et claires. La transition des exigences abstraites à l’implémentation concrète est facilitée par ces diagrammes.
Concentrez-vous sur la clarté plutôt que sur la complexité. Utilisez la hiérarchie pour gérer la profondeur. Utilisez l’historique pour gérer la mémoire. Utilisez la concurrence pour gérer le parallélisme. Lorsque ces principes sont appliqués de manière cohérente, le comportement du système résultant est prévisible et fiable. Le diagramme devient un document vivant qui guide le développement et les tests.
Poursuivez le perfectionnement des modèles au fur et à mesure de l’évolution du système. Un modèle statique devient rapidement obsolète. Un processus de modélisation dynamique garantit que la logique du système reste en accord avec la réalité opérationnelle.