











モデルベースシステムエンジニアリング(MBSE)は、複雑なシステムの定義、設計、検証の仕方を変革する。文書中心のプロセスからモデル中心のワークフローへと焦点を移す。システムモデリング言語(SysML)はこの変化の基盤を提供し、システム構造、動作、要件を標準化された方法で表現する。しかし、概念図から機能モデルへの移行は、静的文書では隠されているギャップを露呈することが多い。
本ガイドは、エレベータシステムを対象とした実践的なケーススタディを検討する。概念としては単純に見えるが、SysMLにおけるモデリングプロセスは、複雑な動作上の問題、タイミング制約、インターフェースの曖昧さを明らかにする。この例を詳細に分析することで、厳密なモデリング手法が、安全性と信頼性にとって不可欠な隠れた複雑性をどのように明らかにするかを検証する。
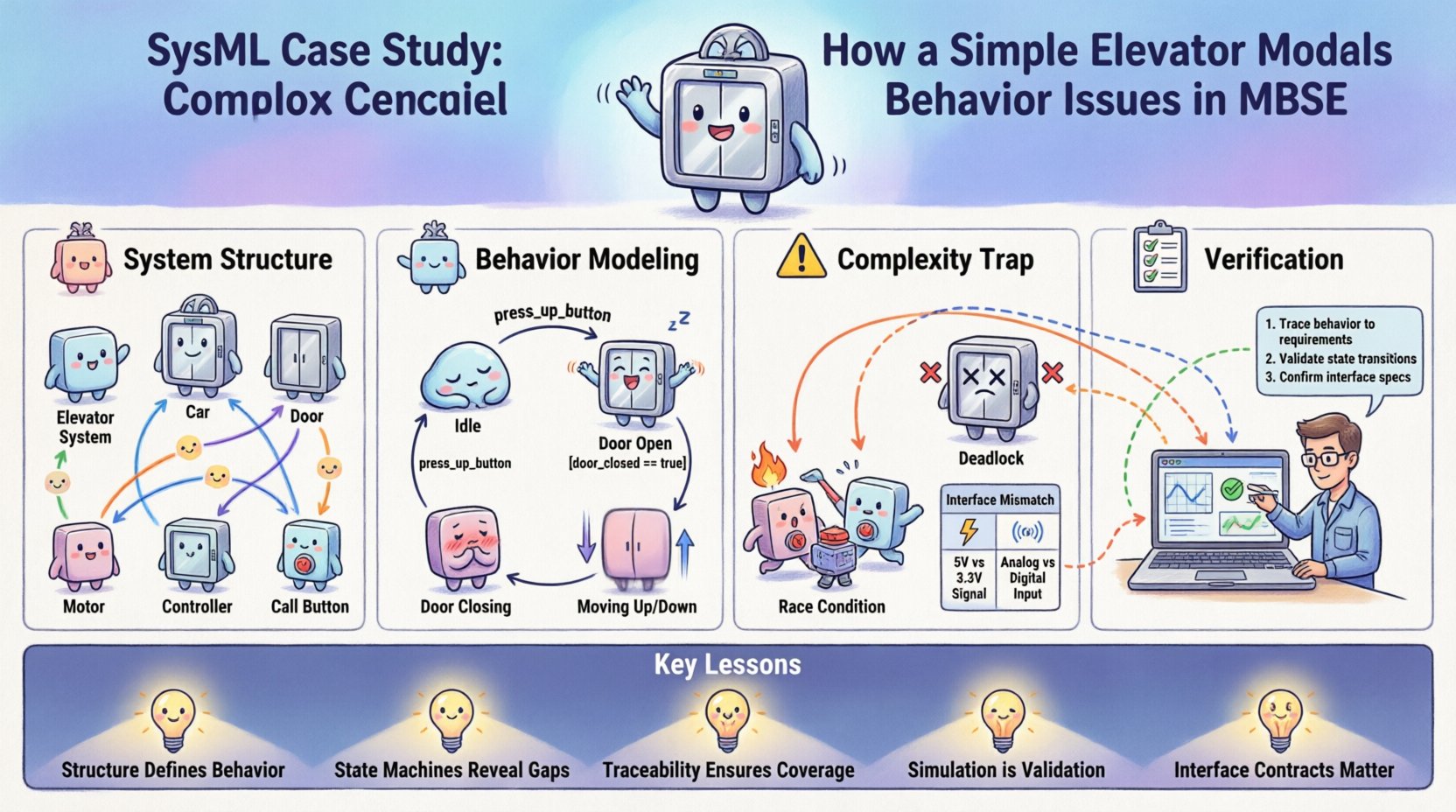
🏗️ システム構造の理解
SysMLモデリングの第一歩は、システムの境界と構成を定義することである。エレベータの場合、単に上下に動く車両という構造ではない。定義されたインターフェースを通じて相互作用する複数のサブシステムが含まれる。
1.1 ブロック定義図(BDD) 🧩
ブロック定義図は、システム内のオブジェクトの種類を定義する。この状況では、以下の主要なブロックを定義する:
- エレベータシステム: 最上位のコンテナ。
- 車両: 乗客用空間。
- ドア: 入り口のメカニズム。
- モーター: 推進装置。
- コントローラ: 操作を管理する論理ユニット。
- コールボタン: 入力用のユーザーインターフェース。
これらのブロックは、一般化関係および構成関係によって結びついている。例えば、エレベータシステムは車両、ドア、モーターから構成される。この構造的定義により、すべての物理的部品に対応するモデル要素が存在することが保証される。
1.2 内部ブロック図(IBD) 🔄
BDDは種類を定義するのに対し、内部ブロック図(IBD)はインスタンスと接続を定義する。ここでは、データおよびエネルギーの流れが指定される。
- ポート: 相互作用のポイントを定義する。例えば、モーターには電力ポートが必要であり、コントローラには信号ポートが必要である。
- フロー特性: ポート間を移動するものを定義する。電気信号はコールボタンからコントローラへ流れる。機械的パワーはモーターから車両へ流れる。
- 参照: 部品をそれぞれのブロックにリンクする。
詳細なIBDを作成することで、エンジニアはコントローラがドアとどのように通信するかを正確に指定しなければならない。直接的な物理的接続か、論理的な信号か。この違いはテキストベースの要件ではしばしば見過ごされてしまうが、モデルでは明確に表現される。
🧠 状態機械を用いた動作のモデリング
構造だけでは機能性が定義されない。SysMLは、状態機械図を用いてシステムの動的動作をモデル化する。ここからエレベーターの事例研究が、大きな複雑性を明らかにし始める。
2.1 状態の定義 ⏸️
状態機械は、特定のブロックまたはシステム全体のライフサイクルを表す。エレベーターの一般的な状態には、以下のようなものがある。
- 停止中:呼び出しを待機中。
- ドア開き:乗客が利用可能。
- ドア閉鎖中:閉じた状態へ移行中。
- 上昇中:階層へ上昇中。
- 下降中:階層へ下降中。
- 停止中:階層到着、ドア閉鎖。
各状態は、システムが特定の活動を実行するか、イベントを待機する安定した状態を表す。
2.2 遷移とイベント ⚡
イベントが発生すると遷移が発生する。イベントは外部(ボタン押下)または内部(センサ信号)のいずれかである。ガードは遷移が許可されるかどうかを決定する。
以下の遷移を検討する:ドア開きからドア閉鎖:
- イベント:タイマーの期限切れまたはドア閉鎖信号。
- ガード:ドアの開口部に障害物が検出されない。
- アクション:ドアモーターを起動する。
ここでは、モデルが潜在的な問題を明らかにする。ガード条件がタイマーにのみ依存する場合、システムは乗客の上にドアを閉じてしまう可能性がある。一方、障害物センサにのみ依存する場合、センサに不具合があるとドアが閉じることなく永遠に開いたままになる。このモデルは、これらの矛盾する入力間の優先順位論理をエンジニアに定義させることを強いる。
🕸️ 複雑性の罠:タイミングと相互作用
この事例研究の最も重要な価値は、タイミングに関する問題の発見にある。単純な状態機械は通常、瞬時に遷移すると仮定するが、現実のシステムは連続時間で動作する。
3.1 レースコンディション ⏱️
レースコンディションとは、システムの挙動がイベントの順序やタイミングに依存する場合に発生する。エレベータモデルでは、ドアが閉じている間に乗客が階数ボタンを押す状況を検討する。
シナリオ A: ボタン押下がドアの完全閉鎖より前に処理される。システムはドアを開け、指定された階に移動する。
シナリオ B: ボタン押下が登録される前にドアが完全に閉じる。システムは現在の行程が完了してから、指定された階に移動する。
モデルにシミュレーションや正確なタイミング制約がなければ、これらの2つの結果は区別できない。SysMLアクティビティ図は行動の順序を可視化するのに役立つが、状態機械には曖昧さを防ぐためにタイミング制約を明記する必要がある。
3.2 デッドロックのシナリオ 🚫
デッドロックとは、システムがこれ以上遷移できない状態に入ることを指す。これは深刻な障害モードである。
エレベータモデルでは、以下の状態が発生した場合にデッドロックが発生する可能性がある:
- 車両が階の間に位置している。
- ドアがロックされている。
- モーターが電源オフになっている。
- 緊急通報が登録されていない。
この状態で電源が落ちた場合、システムは移動できなくなる。モデルには「緊急電源状態」または「救助モード」を標準論理を上書きする機能を含める必要がある。この要件をモデリング段階の初期に特定することで、後々の高コストなハードウェア変更を防ぐことができる。
3.3 インターフェースの不整合 📡
複雑な挙動は、しばしばサブシステム間の不整合から生じる。コントローラーは信号をモーターに送信する。モーターは特定の電圧範囲を期待している。モデルはインターフェース契約を定義しなければならない。
| インターフェース要素 | 期待値 | 実世界でのばらつき | リスク |
|---|---|---|---|
| 信号遅延 | < 50ms | 配線による変動 | ドア安全遅延 |
| 電源電圧 | 24V DC | 20V – 28V | モーター停止 |
| ドアセンサー | 2値(オン/オフ) | アナログノイズ | 偽の開口信号 |
IBDでこれらのインターフェースをマッピングすることで、エンジニアは信号劣化が発生する可能性のある箇所を把握できる。このような可視化は、フラットな要件文書では不可能である。
🔍 検証とトレーサビリティ
MBSEの核となる約束の一つがトレーサビリティである。モデル内のすべての要素は、要件に遡ってつながり、テストケースに前向きにリンクするべきである。エレベータモデルは、このリンクの強力さを示している。
4.1 要件割当 📋
要件は単なるテキストではない。モデルに対する制約である。例えば:
- REQ-01: エレベータは3秒以内に呼び出しに応答しなければならない。
- REQ-02: 障害物が検出された場合、ドアは閉じてはならない。
モデルにおいて、REQ-01はステートマシンの遷移時間を制約する。REQ-02はドア閉鎖遷移のガード条件を制約する。モデルが制約を満たせない場合、その要件は未検証としてマークされる。
4.2 シミュレーションと検証 🎮
静的モデルは静的である。動作の検証には、モデルをシミュレートする必要がある。シミュレーションにより、エンジニアはイベントを注入し、システムの反応を観察できる。
シミュレーション手順:
- システムをアイドル状態に初期化する。
- 3階で呼び出し要求イベントを発生させる。
- 遷移を観察する上昇中.
- 「注入する」障害イベント中にドア閉鎖中.
- システムが元に戻ることを確認するドア開閉.
シミュレーションがステップ5で失敗した場合、モデルの論理に誤りがある。このフィードバックループにより、物理的なハードウェアが構築される前に反復的な改善が可能になる。
🛠️ モデリングの一般的な落とし穴
明確な事例があっても、エンジニアはSysMLモデルにしばしば誤りを導入する。これらの落とし穴を認識することは、モデルの整合性を保つために不可欠である。
5.1 過剰な抽象化 🌫️
あまりに抽象的なモデルを作成すると、重要な詳細が隠れてしまう。モーター・ブロックを内部動作のないブラックボックスとして扱うと、エンジニアは応答時間を検証できなくなる。モデルは必要な分析レベルをサポートできるだけの詳細さが必要である。
5.2 抽象度が不足している 🧱
逆に、すべてのネジやボルトまでモデル化するのは非効率である。モデルは開発の現在の段階に関連するシステムレベルの挙動に焦点を当てるべきである。詳細度はプロジェクトの段階に合わせるべきである。
5.3 不統一な表記 📝
状態やブロックの命名に異なる規則を使用すると混乱を招く。標準化された命名規則が不可欠である。たとえば、常に現在形で状態を命名する(例:ドア閉鎖ではなくドア閉鎖中という状態名とする)。
📈 エレベータモデルから得た教訓
この事例研究は、システム工学におけるいくつかの重要な教訓を浮き彫りにする。
- 構造が挙動を定義する:明確な構造がなければ、挙動をモデル化することはできない。IBDが可能な相互作用を規定する。
- 状態機械は論理的な穴を明らかにする:状態を明示的に定義することで、電源喪失やセンサー故障などのエッジケースを検討する必要が生じる。
- トレーサビリティがカバレッジを保証する:要件をモデル要素に関連付けることで、安全制約が見逃されることがない。
- シミュレーションが検証である:モデルを実行することが、タイミングおよび相互作用論理を検証する唯一の方法である。
- インターフェース契約が重要である:ポートとフローを定義することで、サブシステム間の統合問題を防ぐことができる。
🚀 MBSEにおける前進
エレベータの例は、より大きなシステムの縮図である。宇宙船、自動車のブレーキシステム、医療機器の設計においても、原則は同じである。抽象化によって複雑さは排除されない。むしろ、厳密なモデリングによって管理されるのである。
プロジェクトの規模が大きくなるにつれて、SysMLの厳密な運用がさらに重要になる。それは、エンジニアリング、ソフトウェア、ハードウェアのチームを統一する唯一の真実の源を提供する。モデルを静的な図ではなく、生きているアーティファクトとして扱うことで、組織はリスクを低減し、製品の品質を向上させることができる。
単純な図から検証済みのシミュレーションへと至る道のりには、忍耐と正確さが求められる。しかし、行動、タイミング、相互作用に関する洞察は、価値が非常に高い。それらは、エンジニアリングプロセスを試行錯誤の作業から、予測可能で検証可能なワークフローへと変革する。
結局のところ、目標は単に動作するシステムを構築することではなく、理解されるシステムを構築することである。モデルが理解である。シミュレーションが証明である。そして要件が約束である。