











La ingeniería de sistemas basada en modelos (MBSE) transforma la forma en que se definen, diseñan y verifican los sistemas complejos. Cambia el enfoque de los procesos centrados en documentos hacia flujos de trabajo centrados en modelos. El Lenguaje de Modelado de Sistemas (SysML) sirve como fundamento para este cambio, proporcionando una forma estandarizada de representar la estructura del sistema, su comportamiento y sus requisitos. Sin embargo, la transición de un diagrama conceptual a un modelo funcional a menudo revela lagunas que la documentación estática oculta.
Esta guía explora un estudio de caso práctico que involucra un sistema de ascensor. Aunque el concepto parece sencillo, el proceso de modelado en SysML revela problemas complejos de comportamiento, restricciones de tiempo e ambigüedades en las interfaces. Al analizar este ejemplo, examinamos cómo las prácticas rigurosas de modelado revelan complejidades ocultas que son críticas para la seguridad y la fiabilidad.
🏗️ Comprendiendo la estructura del sistema
El primer paso en el modelado de SysML consiste en definir los límites del sistema y su composición. En el caso de un ascensor, la estructura no es simplemente un coche que se mueve hacia arriba y hacia abajo. Implica múltiples subsistemas que interactúan a través de interfaces definidas.
1.1 Diagrama de definición de bloques (BDD) 🧩
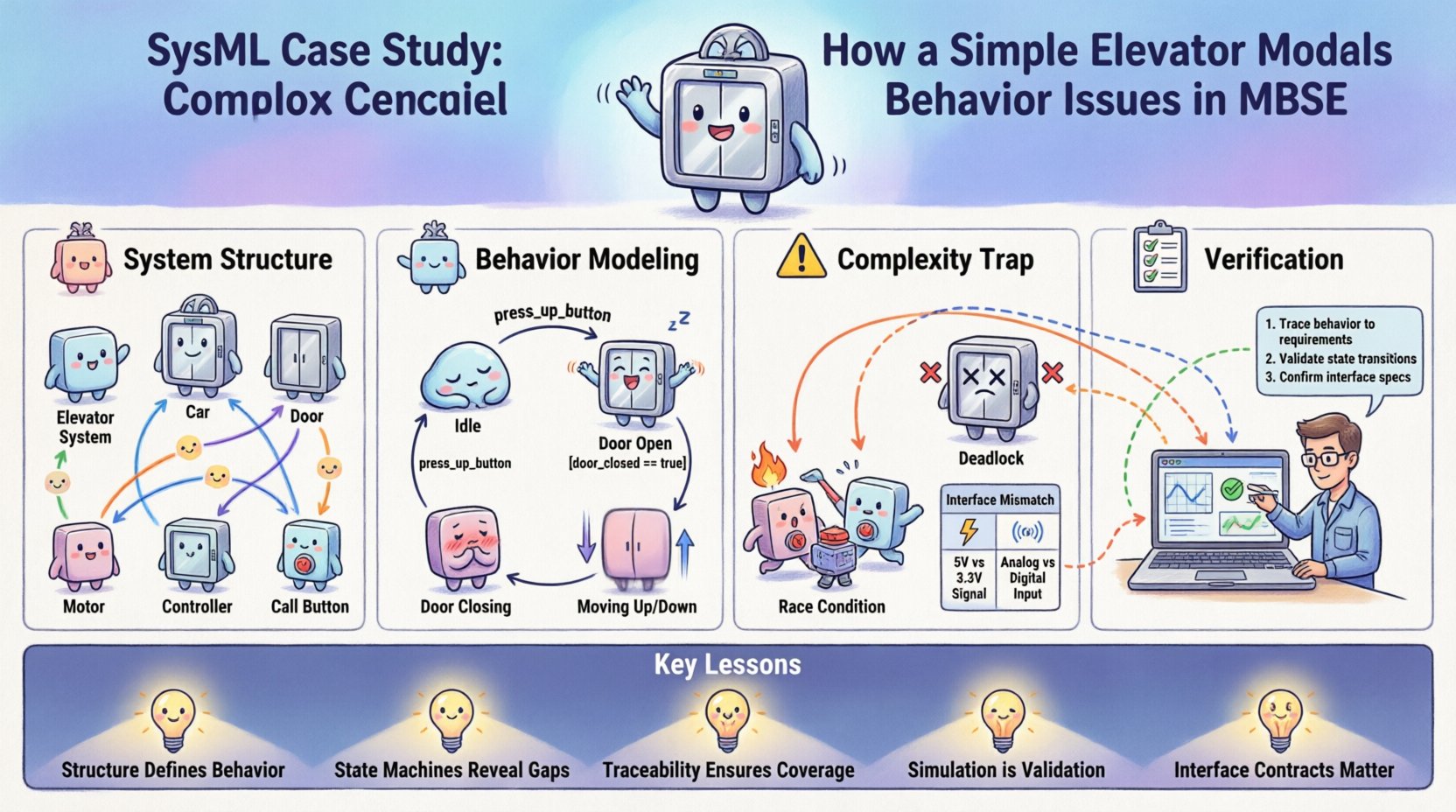
Un diagrama de definición de bloques establece los tipos de objetos dentro del sistema. En este escenario, definimos los siguientes bloques principales:
- Sistema de ascensor: El contenedor de nivel superior.
- Carro: El compartimiento para pasajeros.
- Puerta: El mecanismo de acceso.
- Motor: La unidad de propulsión.
- Controlador: La unidad lógica que gestiona las operaciones.
- Botón de llamada: La interfaz de usuario para la entrada.
Estos bloques están relacionados mediante relaciones de generalización y composición. Por ejemplo, el Sistema de ascensor está compuesto por un Carro, una Puerta y un Motor. Esta definición estructural garantiza que cada componente físico tenga un elemento de modelo correspondiente.
1.2 Diagrama de bloque interno (IBD) 🔄
Mientras que el BDD define tipos, el Diagrama de bloque interno define instancias y conexiones. Aquí se especifica el flujo de datos y energía.
- Puertos: Definen puntos de interacción. Por ejemplo, el Motor requiere un puerto de energía, mientras que el Controlador requiere un puerto de señal.
- Propiedades de flujo: Definen lo que se mueve entre puertos. Las señales eléctricas fluyen desde el Botón de llamada hasta el Controlador. La energía mecánica fluye desde el Motor hasta el Carro.
- Referencias: Enlazan partes con sus bloques correspondientes.
Crear un IBD detallado obliga al ingeniero a especificar exactamente cómo el Controlador se comunica con la Puerta. ¿Es una conexión física directa o una señal lógica? Esta distinción a menudo se pierde en los requisitos basados en texto, pero se vuelve explícita en el modelo.
🧠 Modelado de comportamiento con máquinas de estados
La estructura sola no define la funcionalidad. SysML utiliza Diagramas de Máquinas de Estados para modelar el comportamiento dinámico del sistema. Es aquí donde el estudio de caso del ascensor comienza a revelar una complejidad significativa.
2.1 Definición de Estados ⏸️
Una Máquina de Estados representa el ciclo de vida de un bloque específico o del sistema en su conjunto. Los estados comunes para un ascensor incluyen:
- Inactivo: Esperando una llamada.
- Puerta Abierta:Accesible para los pasajeros.
- Puerta Cerrándose:Transición hacia un estado cerrado.
- Movimiento Hacia Arriba:Ascendiendo a un piso.
- Movimiento Hacia Abajo:Descendiendo a un piso.
- Detenido:Llegado a un piso, puertas cerradas.
Cada estado representa una condición estable en la que el sistema realiza actividades específicas o espera un evento.
2.2 Transiciones y Eventos ⚡
Las transiciones ocurren cuando se activa un evento. Los eventos pueden ser externos (una pulsación de botón) o internos (una señal de sensor). Las condiciones guardias determinan si una transición está permitida.
Considere la transición desdePuerta AbiertahaciaPuerta Cerrándose:
- Evento:El temporizador expira o se recibe la señal de puerta cerrada.
- Guardia:No se detecta ninguna obstrucción en la puerta.
- Acción:Activar el motor de la puerta.
Aquí, el modelo revela un problema potencial. Si la condición guardia depende únicamente de un temporizador, el sistema podría cerrar la puerta sobre un pasajero. Si depende únicamente de un sensor de obstrucción, la puerta podría nunca cerrarse si el sensor está defectuoso. El modelo obliga al ingeniero a definir la lógica de prioridad entre estas entradas conflictivas.
🕸️ La trampa de la complejidad: temporización e interacciones
El valor más significativo de este estudio de caso radica en el descubrimiento de problemas de temporización. Una máquina de estados simple suele asumir transiciones instantáneas, pero los sistemas del mundo real operan en tiempo continuo.
3.1 Condicionantes de carrera ⏱️
Una condición de carrera ocurre cuando el comportamiento del sistema depende del orden o la temporización de los eventos. En el modelo del ascensor, considere la situación en la que un pasajero presiona un botón de piso mientras la puerta se está cerrando.
Escenario A: La presión del botón se procesa antes de que la puerta se cierre completamente. El sistema abre la puerta y se mueve al piso solicitado.
Escenario B: La puerta se cierra completamente antes de que se registre la presión del botón. El sistema solo se mueve al piso solicitado después de completar el viaje actual.
Sin simulación o restricciones de temporización precisas en el modelo, estos dos resultados son indistinguibles. Los diagramas de actividad de SysML pueden ayudar a visualizar la secuencia de acciones, pero las máquinas de estados deben estar anotadas con restricciones de temporización para evitar ambigüedades.
3.2 Escenarios de bloqueo 🚫
Un bloqueo ocurre cuando el sistema entra en un estado en el que no son posibles más transiciones. Este es un modo de fallo crítico.
En el modelo del ascensor, podría producirse un bloqueo si:
- El ascensor está entre pisos.
- La puerta está bloqueada.
- El motor está apagado.
- No se ha registrado ninguna llamada de emergencia.
Si falla la alimentación en este estado, el sistema no puede moverse. El modelo debe incluir unEstado de alimentación de emergencia o unModo de rescate que sobrescriba la lógica estándar. Identificar este requisito temprano en la fase de modelado evita cambios costosos en el hardware más adelante.
3.3 Mismatches de interfaz 📡
El comportamiento complejo a menudo surge de los desajustes entre subsistemas. El controlador envía una señal al motor. El motor espera un rango de voltaje específico. El modelo debe definir el contrato de interfaz.
| Elemento de interfaz | Valor esperado | Variación en el mundo real | Riesgo |
|---|---|---|---|
| Latencia de señal | < 50 ms | Variable debido a los cables | Retardo de seguridad de la puerta |
| Voltaje de alimentación | 24V CC | 20V – 28V | Bloqueo del motor |
| Sensor de puerta | Binario (Encendido/Apagado) | Ruido analógico | Señal falsa de apertura |
Al mapear estas interfaces en el IBD, el ingeniero puede ver dónde podría ocurrir una degradación de la señal. Esta visibilidad es imposible con un documento de requisitos plano.
🔍 Verificación y trazabilidad
Una de las promesas fundamentales de la MBSE es la trazabilidad. Cada elemento del modelo debe vincularse de regreso a un requisito y hacia un caso de prueba. El modelo de ascensor demuestra el poder de este enlace.
4.1 Asignación de requisitos 📋
Los requisitos no son solo texto; son restricciones sobre el modelo. Por ejemplo:
- REQ-01: El ascensor debe responder a una llamada dentro de 3 segundos.
- REQ-02: La puerta no debe cerrarse si se detecta una obstrucción.
En el modelo, REQ-01 restringe el tiempo de transición de la máquina de estados. REQ-02 restringe la condición de guardia en la transición de cierre de puerta. Si el modelo no puede satisfacer una restricción, el requisito se marca como no verificado.
4.2 Simulación y validación 🎮
Los modelos estáticos son estáticos. Para verificar el comportamiento, el modelo debe ser simulado. La simulación permite al ingeniero inyectar eventos y observar la respuesta del sistema.
Pasos de simulación:
- Inicialice el sistema en el estado Ocupado estado.
- Active un evento de Solicitud de llamada en el piso 3.
- Observe la transición a Moviendo hacia arriba.
- Inyectar un Obstrucción evento durante Puerta Cerrándose.
- Verifique que el sistema regrese a Puerta Abierta.
Si la simulación falla en el paso 5, la lógica del modelo es incorrecta. Este bucle de retroalimentación permite una mejora iterativa antes de construir cualquier hardware físico.
🛠️ Errores Comunes en la Modelización
Aunque se tenga un caso de estudio claro, los ingenieros a menudo introducen errores en el modelo SysML. Reconocer estos errores es esencial para mantener la integridad del modelo.
5.1 Sobreactualización 🌫️
Crear un modelo demasiado abstracto oculta detalles críticos. Si el bloque Motor se trata como una caja negra sin comportamiento interno, el ingeniero no puede verificar su tiempo de respuesta. El modelo debe ser lo suficientemente detallado para soportar el nivel requerido de análisis.
5.2 Subactualización 🧱
Por el contrario, modelar cada tornillo y perno es ineficiente. El modelo debe centrarse en el comportamiento a nivel de sistema relevante para la fase actual del desarrollo. La granularidad debe ajustarse a la etapa del proyecto.
5.3 Notación Inconsistente 📝
Usar diferentes convenciones para nombrar estados o bloques genera confusión. Una convención de nombrado estandarizada es vital. Por ejemplo, nombrar siempre los estados en tiempo presente (por ejemplo, Puerta Cerrada en lugar de Puerta Cerrándose para el estado en sí mismo).
📈 Lecciones Aprendidas del Modelo del Ascensor
Este estudio de caso destaca varias conclusiones clave para la ingeniería de sistemas.
- La Estructura Define el Comportamiento: No puedes modelar el comportamiento sin una estructura definida. El IBD dicta las interacciones disponibles.
- Las Máquinas de Estados Revelan Brechas Lógicas: Definir explícitamente los estados obliga al ingeniero a considerar casos límite como la pérdida de energía o el fallo del sensor.
- La Rastreabilidad Garantiza la Cobertura: Vincular los requisitos a los elementos del modelo asegura que ninguna restricción de seguridad se pase por alto.
- La simulación es validación:Ejecutar el modelo es la única forma de verificar la lógica de temporización e interacción.
- Los contratos de interfaz importan:Definir puertos y flujos previene problemas de integración entre subsistemas.
🚀 Avanzando en MBSE
El ejemplo del ascensor es un microcosmos de sistemas más grandes. Ya sea que se esté diseñando una nave espacial, un sistema de frenos automotriz o un dispositivo médico, los principios permanecen los mismos. La complejidad no se elimina mediante la abstracción; se gestiona mediante modelado riguroso.
A medida que los proyectos crecen en escala, la disciplina de SysML se vuelve aún más crítica. Proporciona una única fuente de verdad que alinea a los equipos de ingeniería, software y hardware. Al tratar el modelo como un artefacto vivo en lugar de un diagrama estático, las organizaciones pueden reducir riesgos y mejorar la calidad del producto.
El camino desde un diagrama simple hasta una simulación verificada requiere paciencia y precisión. Pero las percepciones obtenidas sobre el comportamiento, la temporización y la interacción son invaluables. Transforman el proceso de ingeniería de un ejercicio de prueba y error en un flujo de trabajo predecible y verificable.
En última instancia, el objetivo no es solo construir un sistema que funcione, sino construir un sistema que sea comprendido. El modelo es la comprensión. La simulación es la prueba. Y los requisitos son la promesa.